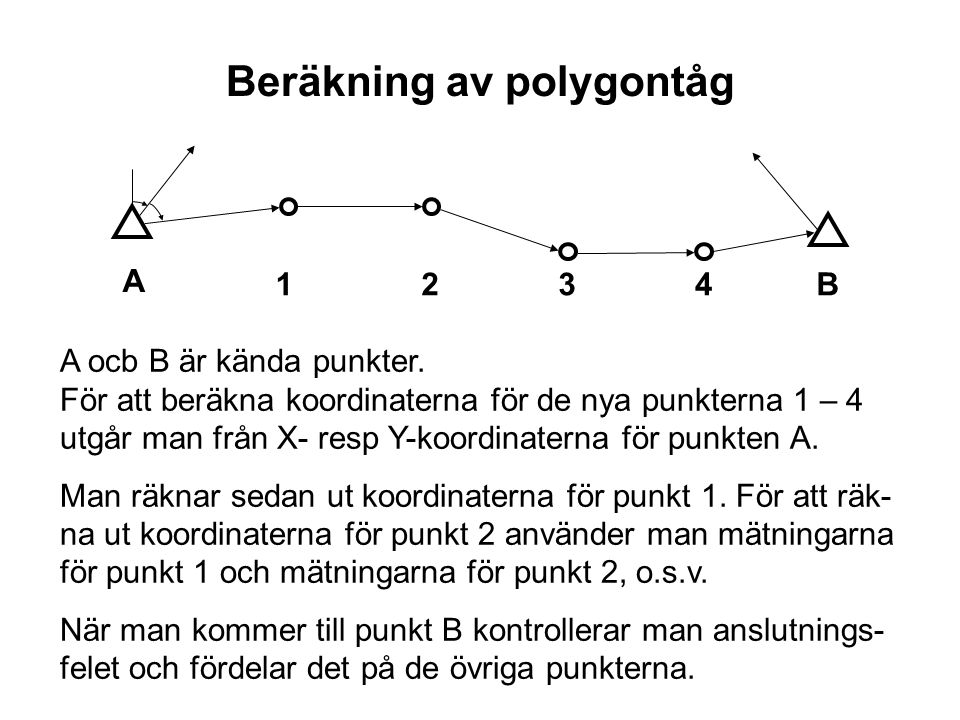
Beräkning av avvägningståg Känd höjd Avläst höjd Beräkn höjd Avläst längd Total För-bättring Slutlig höjd Punktnr Bak Fram Diff. längd 1001 95,354 101 2,366 1,033 1,333 96,687 24,4 20,5 44,9 0,003 96,690 102 1,221 1,343 -0,122 96,565 35,6 32,8 68,4 0,004 96,572 103 1,537 1,216 0,321 96,886 34,1 30,8 64,9 0,004 96,899 1002 95,347 1,011 2,566 -1,555 95,331 29,3 30,6 59,9 95,347 Tot diff 0,016 Summor 238,1 Förbättringsberäkning f = total förbättring = skillnad mellan beräknat och känt värde på slutpunkten fn = förbättring i punkt n Σl = summa total längd ln = längd sträcka n ln Σl fn = f x
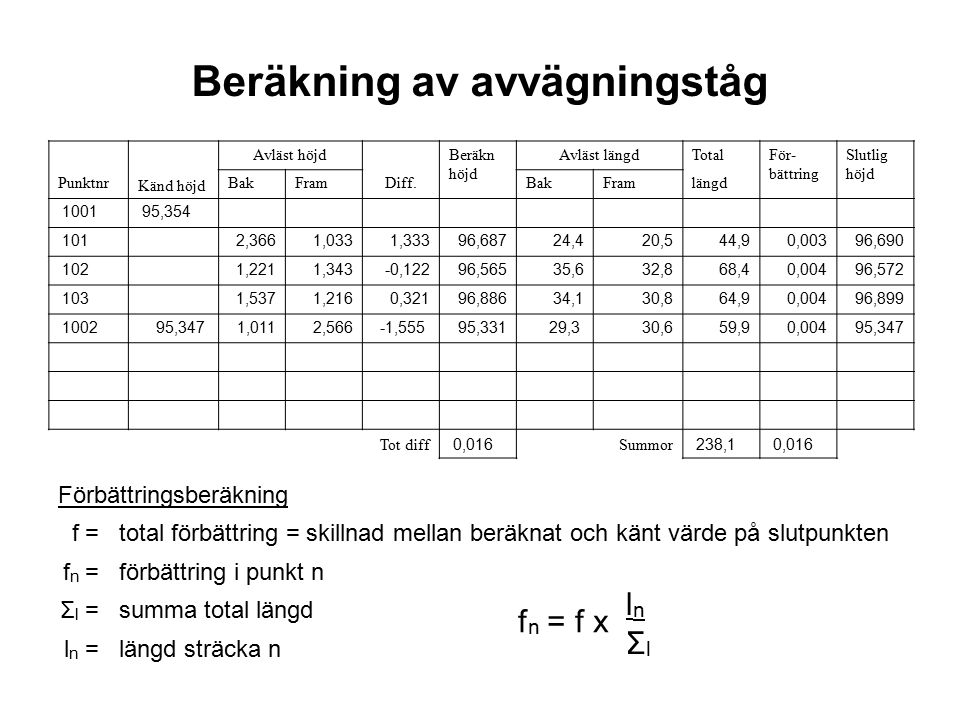
Beräkning av polygontåg 1 2 3 4 B A ocb B är kända punkter. För att beräkna koordinaterna för de nya punkterna 1 – 4 utgår man från X- resp Y-koordinaterna för punkten A. Man räknar sedan ut koordinaterna för punkt 1. För att räk-na ut koordinaterna för punkt 2 använder man mätningarna för punkt 1 och mätningarna för punkt 2, o.s.v. När man kommer till punkt B kontrollerar man anslutnings-felet och fördelar det på de övriga punkterna.
Beräkning av polygontåg Koordinaterna för de nya punkterna 1 – 4 beräknas enligt formeln: X1 = XA + d1 x cos v1 Y1 = YA + d1 x sin v1 X2 = XA + d1 x cos v1 + d2 x cos v2 Y1 = YA + d1 x sin v1 + d2 x sin v2 o.s.v. Eventuellt anslutningsfel utjämnas
Beräkning av orienterad riktning β = (riktn A – P) – (riktn A – B) orienterad riktn A – P = (or. riktn. A – B) + β
Arealberäkning ur koordinater A = 0,5 * Σxi * (yi+1 – yi-1) 2 1 3 5 4