Thomas Johansson1 Kunskapsrepresentation n Vad är Verkligheten ? n Finns Gud ? n Vad är Kunskap ?
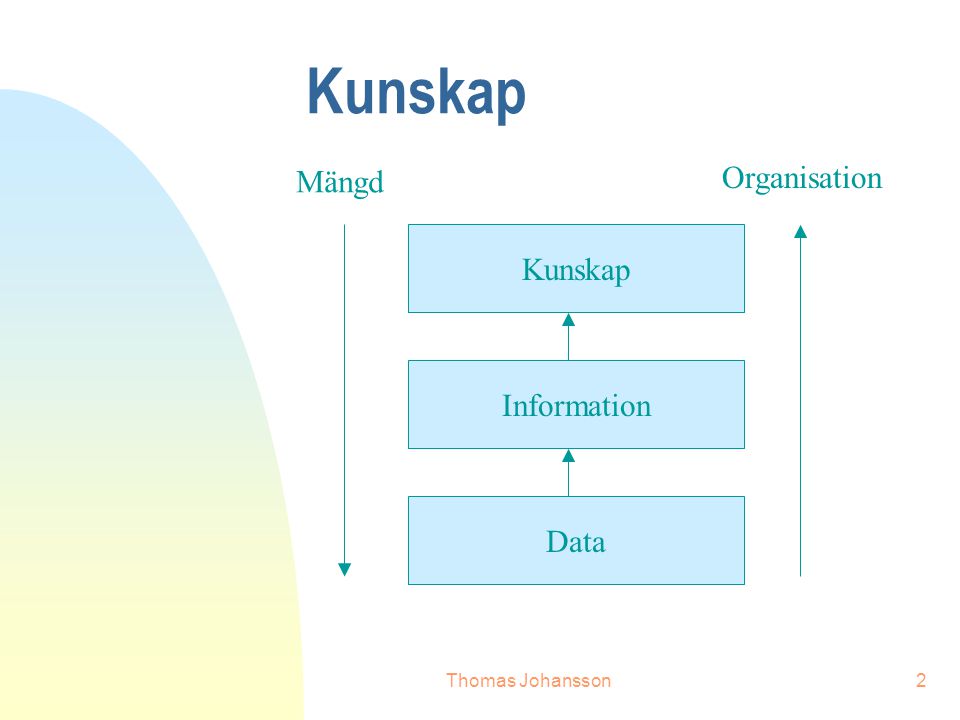
Thomas Johansson2 Kunskap Information Data Mängd Organisation
Thomas Johansson3 Två viktiga karakteristiker hos kunskap n Ett förhållande till omvärlden - tidsaspekten (ST, LT) - mappning (abs, rel) n Kan förutsäga något - utan förutsägelser behövs ingen kunskap - kan ’luras’
Thomas Johansson4 Kompromisser Robotens värld Dynamisk, föränderlig Kraftigt strukturerad FabrikInomhusUtomhus’Slagfält’ Förutsägbarhet Värdet av kunskap Värdet av indata Svårighet
Thomas Johansson5 Egenskaper hos kunskap Psykologisk uppdelning n Behaviorister och före ”Kunskap finns inbyggt i reflexsystemet” - inga speciella strukturer - inga speciella processer n Kognitiva psykologer - kognitiva kartor - neurobiologiska bevis - ’Action Vectors’
Thomas Johansson6 Typer av representation n Explicit - Symbolisk, diskret, manipulerbar - Typiskt traditionell AI n Implicit - underförstådd men kan beskrivas n Underförstådd (’Tacit’) - ’Tyst kunskap’ - Kan inte beskrivas - Hur gör du när du cyklar ?
Thomas Johansson7 Problem med explicit kunskap Explicit kunskap betyder symbolisk representation, som leder till ’The Symbol Grounding Problem’ Svårigheten att förbinda en symbol med en händelse eller företeelse i ’verkliga världen’
Thomas Johansson8 Typer av kunskap n Rumslig kunskap n Kunskap om saker n Perceptuell kunskap n Beteende n Självkännedom n Kunskap om målet
Thomas Johansson9 Ett annat sätt att dela in kunskap n Beständig - a priori, dvs inlagd i förväg - finns kvar hela tiden - lagras i LTM n Flyktig - roboten bygger upp sin egen bild - försvinner när en ny situation uppstår - STM n Reaktiv/reflexiv
Thomas Johansson10 Tidsaxel Reaktiv Inhämtad kunskap A priori- kunskap Omedelbar STMLTM
Thomas Johansson11 Associativt minne n Ofta tillsammans med neurala nätverk n Inkommande mönster triggar svar lagrade i en nätverksmodell n Retinotopic: mappar näthinnan på synbarken n Somatotopic: mappar kroppens yta på hjärnan
Thomas Johansson12 Filosofiska hörnan n Epistemologi - ’Kunskapslära’ - användbarhet och giltighet hos kunskap i robot-system n Ontologi - mer specifik för representationer - bestämmer vad som finns (eller kan förstås) i just vårt system.
Thomas Johansson13 Kunskapsrepresentation i robotar Många djur använder kognitiva kartor n Fåglar (avstånd och riktning) n Bin och andra insekter (triangulering) n Råttor (absolut avstånd och kompassriktning) n Kanske inte tillräckligt motiv för att använda dem n Biologisk ekonomi
Thomas Johansson14 Representationstyper n Korttidsminne för ett beteende - bara info för det specifika betendet lagras - modularitet och inkrementell utveckling n Konstruerade kartor i långtidsminne - byggs av roboten under experimentet - kan modifieras ’under gång’ - svårigheter med dynamiken n A priori-kartor - lagras i förväg - Info som roboten inte själv kan finna
Thomas Johansson15 Korttidsminne för ett beteende n Minskar behovet av sampling n Info om omgivningen utanför givarnas område Tre karakteristika: n Ett minne per beteende n Buffer mellan givare och beteende n Kortvarigt - måste byggas upp igen - lokalisering - dynamisk omgivning
Thomas Johansson16 Representation via rutnät n Upplösning n Form - ofta rektangulärt, men andra former förekommer n Storlek - ofta lika stora celler, men kan variera - quadtrees
Thomas Johansson17 Exempel n Avoid-past - Undviker att roboten ’fastnar’ - Lagrar var roboten varit och undviker dessa ställen n Wall-following - confidence n Action memory - lagrar tidigare beteende n Avtagande värden - nya data viktigare än gamla
Thomas Johansson18 Kartor i långtidsminne n Rådgivande, används av flera beteenden n Konstruerade från givardata eller n A priori n Kvantitativa data - ’14 cm framåt’ n Kvalitativa - ’till höger om nästa dörr’
Thomas Johansson19 För- och nackdelar n Gamla data n Lokalisering n Information om omgivningen längre bort n Givar-data viktigare än kartinformation
Thomas Johansson20 Kognitiva kartor från givar-data n Information från robotens synvinkel n Olika ’livslängd’ n Kvalitativ representation - klarar fel i avläsningar och navigering n ’Distinctive places’ - symmetri - abrupta ändringar i avläsningar - ovanliga data - maximum/minimum n Viewframes
Thomas Johansson21 A priori-kartor n Data kommer inte från roboten - enklare att sammanställa - standardiserade data - förbehandlade data n Nackdelar - fel kan införas i omkodning - gamla data - olika utgångspunkter
Thomas Johansson22 Var eller vad ? n Var är jag och vart är jag på väg ? eller n Vad är det jag ser ? - igenkänning - affordances - vad erbjuder objektet ? - primitiver - orientering - storlek - stabilitet - etc