Ladda ner presentationen
Presentation laddar. Vänta.

1
Distribuerade system & Realtids system Erik Löthman Henrik Jacobsson Johan Byggnings Kristoffer Hellstrand Rohith Menon

2
Inledning Antagande inför lösning Kartläggningsfas Genomsökningsfas Avslutsfas Beslutsfattning Kartläggning och synkronisering Databashantering

3
Antagande inför lösning Den ungefärliga storleken på rummet är känd. All kommunikation anses som pålitlig Ytan är plan och de är precis motorisk Målet är lika stort som en nods avsökningsområde. Dvs. noden lokaliserar målet om majoriteten av målet finns inom avsökningsområdet. All kommunikation anses som korrekt.

4
Initierings fas

5
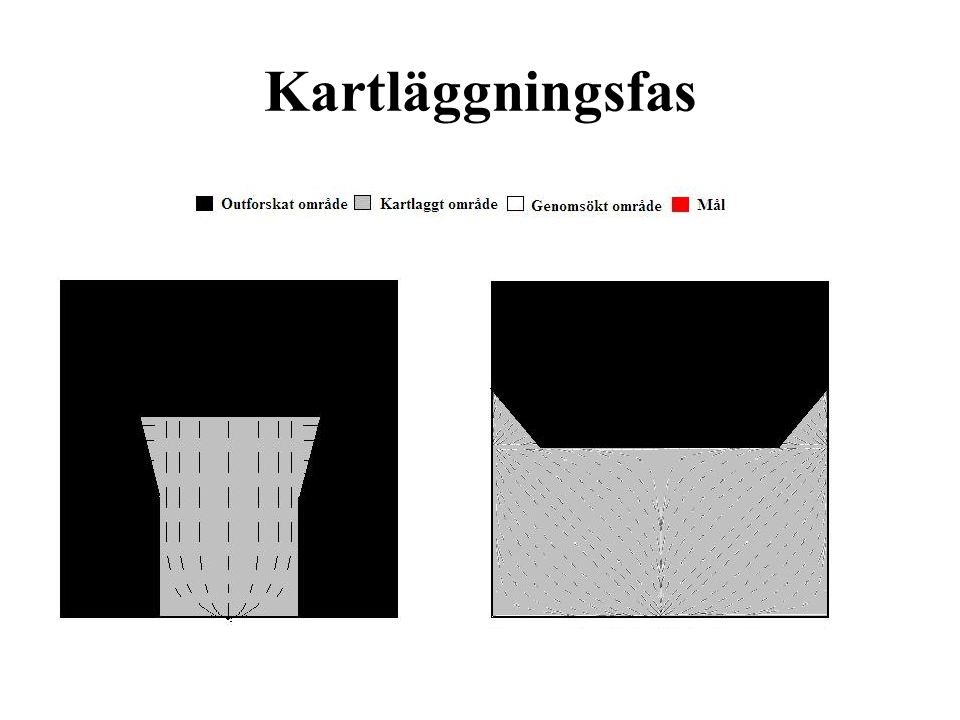
Kartläggningsfas

7
Genomsökningsfas

9
Avslutsfas

10
Beslutsfattning Kollektiv beslutsfattning sker i servern. Individuella beslut sker i varje nod. D* algoritmen. Markovs beslutsprocess

11
Kartläggning och synkronisering Uppdatering via broadcast. Uppdatering äger rum när en nod har förflyttat sig över ett avsökningsområde. Alla noder har en uppsättning av kartan. Timer i noderna och servern

12
Distribuerad Databas och Locking Data Consistency: varje nod har en överensstämmande bild av hur kartan ser ut. Data Concurrency: flera noder ska kunna nå datan samtidigt. Locking: Algoritm för att tillfredställa ovan nämnda krav.

Liknande presentationer