Ladda ner presentationen
Presentation laddar. Vänta.

1
Egils Sviestins SaabTech Systems
Sensordatafusion Egils Sviestins SaabTech Systems

2
Fusion levels (JDL model)
Objects Level 2 Situations Level 3 Intentions Sources Level 4 Process

3
Terminologi Objekt Situationer Avsikter Sensordata- fusion Sensor-
Informations- fusion Andra data Styrning Optimering

4
Modeller Mätningar/information räcker inte Modeller krävs!
Matematiska: exempel Idéer om verkligheten/”mentala” modeller Begränsat av naturlagar, ekonomiska lagar, mänsklig förmåga etc. Mätningar/information snävar in möjligheterna 1 2 3

5
Från verkligheten... Rån = stöld e.d. som utförs under hot om våld

6
Context This is about multitarget, multisensor tracking.
Sensors like radars, jam strobe detectors, ESM equipment, IRST, GPS, pressure based altimeters, observe targets, and report measurements to command & control centre. Measurements from radars often called plots. Measurements from passive sensors often called strobes. Platforms may be moving, although not tested in real life. Tracker maintains a track for each target based on correlated measurements.
![]()
7
Data processing: Improvement or Destruction?
Raw information Sensor User Meaningful information

8
Synkanalen (hypotetiskt!)
")
9
Hörselkanalen (hypotetiskt!)
")
10
Early fusion... ... or late? WSC

11
Seeing (hypothetical)
WSC

12
Artskilda sensorer

13
Tidig fusion - för och emot
Mindre risk för tvetydigheter Osäkerheter kan lättare beskrivas statistiskt - Bayes teori kan användas Mindre robust m a p systematiska fel Svårt hantera artskilda källor

14
Inte så enkelt...

15
Fusionsprincip i hjärnan?

16
The Radar Data Processing Chain
Receiver Extractor Tracker A12 A07 Raw video Plots (R,az) Tracks (#,x,y,vx,vy,...) WSC
 Tracks (#,x,y,vx,vy,...) WSC.")
17
Steps in Tracking
![]()
18
The Tracking Cycle WSC
![]()
19
Filtering techniques Linear regression (least squares batch processing) (hardly used in this context) (70’s) Alpha-Beta (80’s) Adaptive Kalman (90’s) Interactive Multiple Model (IMM) (2000’s ?) Non-linear filtering?
 Alpha-Beta. (80’s) Adaptive Kalman. (90’s) Interactive Multiple Model (IMM) (2000’s ) Non-linear filtering")
20
Linear regression x How to handle maneuvering targets??? t

21
Alpha-Beta filtering Prediction step Updating step
a and b are tuning constants between 0 and 1 Prediction step Updating step a=b=0: Measurement has no effect a=b=1: History has no effect

22
Kalman filtering Current state & uncertainties +
Measurement & uncertainties = New state & uncertainties Like a-b-filter, but: Automatically optimizes a and b Best weighting between history and measurement Output includes estimated accuracy

23
Probability densities
. x Update Prediction Measurement x

24
IMM States

25
IMM structure

26
Bayes teori

27
Associering M målspår, N plottar: hur koppla samman? Närmaste granne?
OBS! Falska/saknade plottar, falska/saknade målspår Närmaste granne? Närmaste granne i statistiskt avstånd? Global optimering statistiskt avstånd (minimera )? Söka globalt mest sannolika koppling? Hur man än gör kan det bli fel. Motiverar multihypotes
 Söka globalt mest sannolika koppling Hur man än gör kan det bli fel. Motiverar multihypotes.")
28
Measurement-to-track association
Clusters with M measurements and N tracks Form hypotheses like Calculate probabilities for each hypothesis, e.g.

29
LPQ association: Plot & Track clusters

30
Bayesian track initiation
Given a tentative track. Two hypotheses: H0: Track is false H1: Track is genuine Cn=p(H1): Credibility at scan n Obtained measurement z. Spurious plot density ps.
: Credibility at scan n. Obtained measurement z. Spurious plot density ps.")
31
Initiation by Credibility
Required: Fast initiation and low false track rate Sequential hypothesis testing Credibility C » likelihood that a potential track is genuine C 1 2 3 4 5 6 7 8 Scan # cred

32
Andra sensorer Bildalstrande Icke bildalstrande TV
FLIR (Forward Looking Infrared) Millimetervågsradar SAR (Synthetic Aperture Radar) Icke bildalstrande Störbäringsavtagare Signalspaning IRST (Infrared Search & Track) Akustiska/Hydroakustiska sensorer GPS
 Millimetervågsradar. SAR (Synthetic Aperture Radar) Icke bildalstrande. Störbäringsavtagare. Signalspaning. IRST (Infrared Search & Track) Akustiska/Hydroakustiska sensorer. GPS.")
33
Decentralized Multi-Radar Tracking
![]()
34
Centralized Multi-Radar Tracking
![]()
35
Filling coverage gaps Two radars Coverage gap Red single radar track
lost and reinitiated Decentralized MRT may give confusing picture Centralized MRT performs well

36
Disadvantages of centralized multi-radar tracking
More sensitive to bias errors Bias compensation required Difficult to distribute CPU load on several processors But not impossible Existing data links often do not supply plot level data Sometimes requires hybrid solutions Sensors sometimes include extensive processing
![]()
37
Strobes only 150 km

38
Crossings

39
Reasons for Multi-Sensor Tracking
Radars can be jammed Protective need to keep radars silent Radars don’t always give best target detection May support target identification
![]()
40
Target Type Identification
Based on Direct observations ESM / IRST measurements Kinematics Each track carries a vector with probabilities of possible target types. Requires a library of target type characteristics

41
MST+ scenario

42
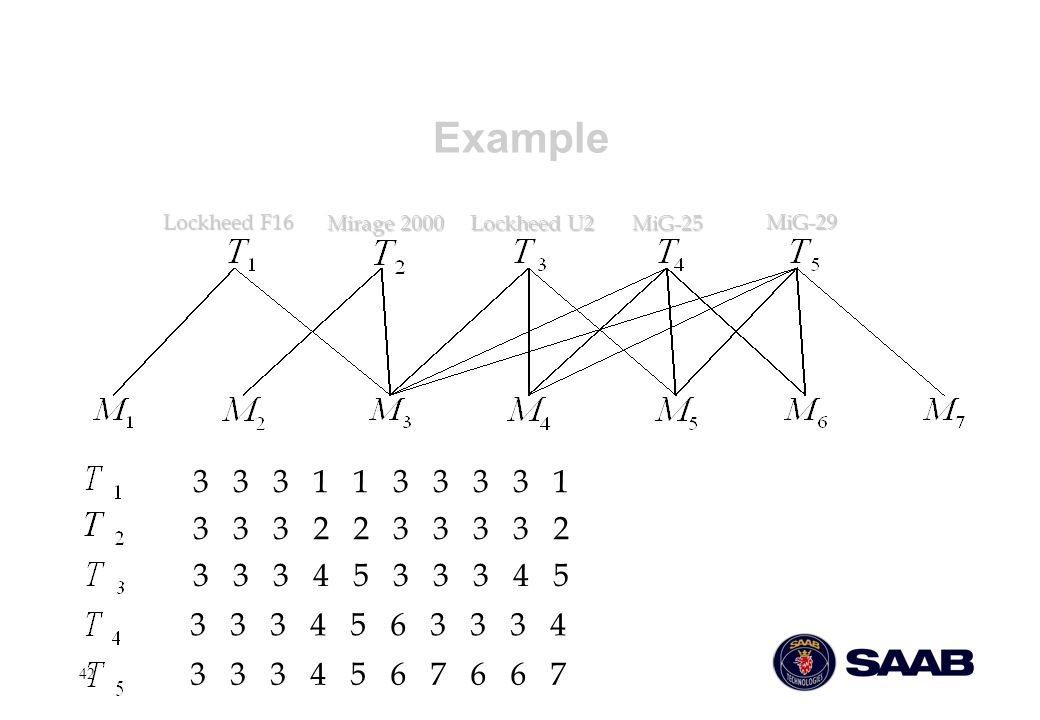
Example Lockheed F16 Mirage 2000 Lockheed U2 MiG-25 MiG-29
43
Kinematic typing Offline: Create Target Type Database
Max altitude Min/Max speed as function of altitude Max climb rate as function of altitude Max distance from base Max linear/turn acceleration as function of altitude

44
Step 1 - Collect flight data
Max altitude Min/max velocity as function of altitude Max climb rate Max distance from base <Max linear/turn acceleration as function of altitude> Utilise meteorological data if available

45
Step 2 - Update Probability Vector
Collected Flight Data New Probability Vector [p´(F16),...] Previous Probability Vector Bayes’ Rule [p(F16),...] Target Type Database
,...] Previous Probability Vector. Bayes’ Rule. [p(F16),...] Target Type Database.")
46
Avrundning Sensordatafusion - uppgifter om enskilda objekt baserat (mest) på sensordata Bygger oftast på matematiska modeller och Bayesiansk hypotesprövning Många svåra områden återstår Sensorer som ger knepiga data Svårtolkade scenarier (t ex mark och undervatten) Gemensam lägesbild (distribuerad fusion) Fusion av starkt artskilda sensorer Integration med infofusion
 Gemensam lägesbild (distribuerad fusion) Fusion av starkt artskilda sensorer. Integration med infofusion.")
Liknande presentationer



















