Ladda ner presentationen
Presentation laddar. Vänta.

1
”Senaste” inom 3D fjärranalys
Redovisning om skoglig flygburen laserskanning och fotogrammetri för skogsinventering Ilkka Korpela, Akademieforskare Institutionen för skogvetenskaper, HU ”... den tvärvetenskapliga verksamheten är att främja ekologiskt, ekonomiskt och socialt hållbar användning av skogarna samt skogs- och myrmiljöerna” ( Namn på två låtar & ett område i Stockholm finns gömmt i ppt-bilder, kan du hitta dom?

2
Syftet Larä känna till Väsentliga ord och begrepp
Den denaste utveckling inom optisk fjäranalysbaserad skogsmätning (uppskattiningen, kartlägning, värdering, ) Powerpoint bilder Vokabulären i 4 sidor, MS-Word filet Ett 45 minuters tal + Paus + Funderingsstund + Meningsbyte
 Powerpoint bilder. Vokabulären i 4 sidor, MS-Word filet Ett 45 minuters tal + Paus + Funderingsstund + Meningsbyte.")
3
Innehållet av föreläsningen
Fjärranalys och skogen – Bakgrundsinformation Historien, förr och i digitaliserade nutider Att surfa på teknikens framgångsrika vågor 3D med bilder – Digital fotogrammetri Den lättare vägen – Laserskanning Vad forskar man just nu? Vad har jag syslat med – ”bästa bitar”

4
Bakgrunden: Syftet med fjärranalystekniker inom skogsuppskattningen
Datainsamling för ett bättre beslutsfattande (temporal/spatial) (efterfrågan för data) En del av skogsbruksplanering, men också (natur-, miljö-, landskaps-, stadsplanering) En näring kostnadseffektivitet (nytta kontra kostnader) Någon betalar alltid aktiviteten. Faktumet som ofta faller i glömskan.
 (efterfrågan för data) En del av skogsbruksplanering, men också (natur-, miljö-, landskaps-, stadsplanering) En näring kostnadseffektivitet (nytta kontra kostnader) Någon betalar alltid aktiviteten. Faktumet som ofta faller i glömskan.")
5
Beslutsfattandet inom skogsbruk
Ekologiska & ekonomiska modeller, prognoser osv. Skogen, infrastruktur för skogsbruk, typ av skogsbruken Olika fjäranalystekniker utgör alternativ (komplettera) här med påföljder senare i kedjan. Skogsägare, myndigheter, politiker, enstaka träd… hela landet, nu..om 20 år
 här med påföljder senare i kedjan. Skogsägare, myndigheter, politiker, enstaka träd… hela landet, nu..om 20 år.")
6
Mitt gammalt skogsinventeringsnomogram

7
Syftet med fjärranalystekniker... (ingen självklarhet)
Alla patienter kan inte hjälpas från rymden och inte med stövelvandring heller Kombination av (Sampling + fältobservationer + expert kunskap (inkl. modeller) + fjäranalysobservationer). Optimering av detta system i det varierande skogsbruket (virkesefterfrågan, priser, kostnader, lönsamhet) och dess infrastruktur (lagstiftning, (stöd)politik, skattepolitik, osv.) Se upp för teknikfanatiker
 + fjäranalysobservationer). Optimering av detta system i det varierande skogsbruket (virkesefterfrågan, priser, kostnader, lönsamhet) och dess infrastruktur (lagstiftning, (stöd)politik, skattepolitik, osv.) Se upp för teknikfanatiker.")
8
Målet? Inom skogsbruksplanering (oberoende av ägoslag) i Finland: Ministeriet vill något. Förr ville (statliga beslutfattarna) att skogar används. De vill också att skogar bevaras. Skogbruksplanering utgör ett medel. Privata skogsägare vill (bl.a.) veta om avverkningsmöj-ligheter och optimering av huggningsaktiviteter. Så noggrant som möjligt med ringa pengar. Firmor vill det-samma och t.o.m. vara medvetna om andras resurser. Databehov för att kunna svara på frågor gällande nutida situationen (eller bak-) och framåt i tiden.
 att skogar används. De vill också att skogar bevaras. Skogbruksplanering utgör ett medel. Privata skogsägare vill (bl.a.) veta om avverkningsmöj-ligheter och optimering av huggningsaktiviteter. Så noggrant som möjligt med ringa pengar. Firmor vill det-samma och t.o.m. vara medvetna om andras resurser. Databehov för att kunna svara på frågor gällande nutida situationen (eller bak-) och framåt i tiden.")
9
Målet – mera allmänt Frågor med tidsmässig och spatial täckning Internationella Klimat, markanvädning,... Nationella Skogs-, energi-, miljöpolitiken Regionala industri-investeringsfrågor, stadsplanering Fastighetsnivå värde, avverkningsmöjligheterna Beståndsnivå skogsvården, optimaliska åtgärder Trädnivå korkekar i Spanien, möbelvirke i Tyskland, Olika krav på noggrannhet, variabler, hållbara kostnader

10
Målet Fastighets – Beståndsnivå:
Olika frågor och variabler enligt åldern / utvecklingsklass (växtplats, volym, tillväxt, distributionsvariabler av höjd- eller diameterdistributionen, LAI? osv.)
")
11
Bakgrund: Så har enkelt är skogsmätning
Att mäta skog innebär, alltid (”gyllene triangeln”): Mätningar och observationer (direkta eller indirekta) Användandet av modeller (beroendet mellan fenomen) Sampling / urval (några får representera Dom Andra) t.ex. Höjd-, relaskåpmätningar, bestämningen av växtplatstypen, pixelvärden, laserpunkter, Volymfunktioner, allometrisk samverkan mellan variabler (krondiametern – stamdiametern), klassificeringsfunktioner Provträd, provytor, -linjer, kluster, gles data,
: Mätningar och observationer (direkta eller indirekta) Användandet av modeller (beroendet mellan fenomen) Sampling / urval (några får representera Dom Andra) t.ex. Höjd-, relaskåpmätningar, bestämningen av växtplatstypen, pixelvärden, laserpunkter, Volymfunktioner, allometrisk samverkan mellan variabler (krondiametern – stamdiametern), klassificeringsfunktioner. Provträd, provytor, -linjer, kluster, gles data,")
12
Fjärranalys (FA) av skogar
Indirekta mätningar från luften / rymden och i skogen (referens-, undervisnings-, kontroll-) Aktiva eller passiva. Elektomagnetisk strålning. Modeller beskriver sambandet mellan variabler av intresse och signaler. Två huvudansatser finns här. Teoretisk FA och Datastyrd FA. Imputering (tilldelning) av det kända beroendet till det okända området/populationen, med statistiska modeller. Urval / Sampling har en mindre (varierande) betydelse, men behövs (t.ex. kontrolldata)
 Aktiva eller passiva. Elektomagnetisk strålning. Modeller beskriver sambandet mellan variabler av intresse och signaler. Två huvudansatser finns här. Teoretisk FA och Datastyrd FA. Imputering (tilldelning) av det kända beroendet till det okända området/populationen, med statistiska modeller. Urval / Sampling har en mindre (varierande) betydelse, men behövs (t.ex. kontrolldata)")
13
Dom två alternativen: empirisk eller teoretisk approach
Objekten Sensorsystemet Fältobservationer + FA-observationer+tolkning Statistisk modell imputering uppskattning av hela området Objekten+Teorin+FA-observationer+fältdata Fysisk modell Inverterad modell + FA-observationer Objekten (kvaliteter) av hela området - Aktiva mot passiva observationer - Spatiala upplösningen, samplingstäthet - Spektrala upplösningen (antalet våglängsbanden) - Radiometriska upplösningen (~Bitdjupet, Signal-brusförhållandet) - Tidsmässiga upplösningen - Mediets inverkan (submarin-, när-, luft-, rymdfjärranalys) - Dimensionen: 2D, 2.5D, 3D
 av hela området - Aktiva mot passiva observationer - Spatiala upplösningen, samplingstäthet - Spektrala upplösningen (antalet våglängsbanden) - Radiometriska upplösningen (~Bitdjupet, Signal-brusförhållandet) - Tidsmässiga upplösningen - Mediets inverkan (submarin-, när-, luft-, rymdfjärranalys) - Dimensionen: 2D, 2.5D, 3D.")
14
Några exempel – Skalan är väsentlig

15
Några till Terrester mot rymd FA Mediet (luft)
")
16
om Historien Teknikens utveckling i fjärranalys, inom civila applikationer har följt denna inom? Försvarsmakten’s första flygbildskameror på 30-talet Finska skogsforskare (R. Sarvas) rapporterade om flygfotokraferingens möjligheter på 30-talet Lantmäteriverket i Finland, efter kriget, grundkartläggning Infrarödfilmen nådde Finland på 1970-talet Stereotolkning av analoga bilder, svaga steg på 1980-talet Ortokorrigerade digitala bilder i slutet av 90-talet (scanning av film) Satellitbilder för rikskogstaxering (Simo Poso, Erkki Tomppo) har existerat i över 25 år. Första tester med laserskanning ~2000 (Juha Hyyppä TKK), första kommersiella flyg sommaren 2004 Digitala ramkameror, f.o.m. 2006
 rapporterade om flygfotokraferingens möjligheter på 30-talet. Lantmäteriverket i Finland, efter kriget, grundkartläggning. Infrarödfilmen nådde Finland på 1970-talet. Stereotolkning av analoga bilder, svaga steg på 1980-talet. Ortokorrigerade digitala bilder i slutet av 90-talet (scanning av film) Satellitbilder för rikskogstaxering (Simo Poso, Erkki Tomppo) har existerat i över 25 år. Första tester med laserskanning ~2000 (Juha Hyyppä TKK), första kommersiella flyg sommaren Digitala ramkameror, f.o.m")
17
Militärteknikens sista landvinningar
GPS/INS- baserat navigerings- system, direkt och exakt orientering av sensorerna (rotationer/vridning och positionen i XYZ på en frekvens bättre än 200Hz) - Flygburen laserskanning, Snabba sändare/mottagare av korta laserpulser, Up till 500 kHz ”PUF”, Exakt orientering av smala “pulsstrålar”, noggran bestäming av flere distanser, kartlägger kronskikten och jordytans geometri samtidigt. Mäter återspridning av ljus. Tidstämplade fotoner. Vågformlasern lagrar provtagna amplituder (tidserie av amplitudsvärden), Ekolasrar lagrar distansobservationer - Digitala flygfotograferingskameror, CCD-sensorer som mäter radians. Förbätringar i radiometrin i jamförelse med filmkameror. - Databehandlingens utveckling, rörlighet, lagringsmediernas kapasitet, hastighet av dataöverförning, nya algoritmer inom datavetenskap, automatiska - Satellitbilder med en upplösning på sub-meternivå, hyperspektrala skannrar.
 - Flygburen laserskanning, Snabba sändare/mottagare av korta laserpulser, Up till 500 kHz PUF , Exakt orientering av smala pulsstrålar , noggran bestäming av flere distanser, kartlägger kronskikten och jordytans geometri samtidigt. Mäter återspridning av ljus. Tidstämplade fotoner. Vågformlasern lagrar provtagna amplituder (tidserie av amplitudsvärden), Ekolasrar lagrar distansobservationer. - Digitala flygfotograferingskameror, CCD-sensorer som mäter radians. Förbätringar i radiometrin i jamförelse med filmkameror. - Databehandlingens utveckling, rörlighet, lagringsmediernas kapasitet, hastighet av dataöverförning, nya algoritmer inom datavetenskap, automatiska - Satellitbilder med en upplösning på sub-meternivå, hyperspektrala skannrar.")
18
om Historien – Vad har teknikens framgång gett oss?
Fina grejer, men … - Att flyga kostar ännu 50+ €/min i atmosfär, Ute i rymden? - Ostadigt väder / molntäcket vs. molnfri med en solelevation på 30 grader - Sommaren är kort - Olika (strukturer) skogar visar lindriga skillnader i mätningar som är tagna på en distans av 110 km eller 600900 km. Inversionen?
 skogar visar lindriga skillnader i mätningar som är tagna på en distans av 110 km eller 600900 km. Inversionen")
19
3D mätningar och bildbehandling - Digital fotogrammetri
“Skogen är ett kompliserad 3D system” Idéen: Rekonstruktion av tredimensionella objekt från mer än en bild. Behövs: En operatör eller algoritm som löser bildmatchningsproblemet. Utmaning: Problemet kan ej lösas entydigt i de flesta fallen (skuggning, perspektiv/ockludering) i skogar. Lösningar leder till “en kombinatorisk explosion”. CHM~krontaksmodell (yta) DEM~terrängsmodell (höjdyta)
 i skogar. Lösningar leder till en kombinatorisk explosion . CHM~krontaksmodell (yta) DEM~terrängsmodell (höjdyta)")
20
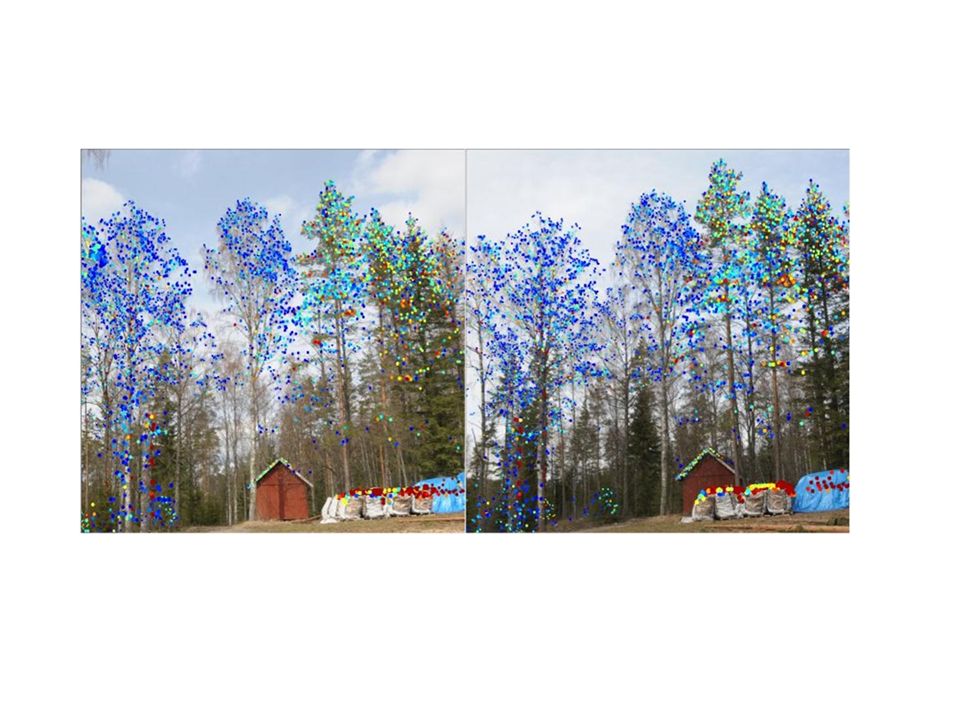
3D mätningar och bildbehandling - Digital fotogrammetri
Andel fotosynliga träden enligt relativa höjden (0-1). “Skogen är ett kompliserad 3D system” Manuell lösning till bildmatchingproblemet för trädtoppar.
. Skogen är ett kompliserad 3D system Manuell lösning till bildmatchingproblemet för trädtoppar.")
21
3D mätningar och bildbehandling - Digital fotogrammetri
Lösning till bildmatchings-problemet genom att be-gränsa volymen av möjliga lösningar – geometrisk begränsning.

22
3D mätningar och bildbehandling - Digital fotogrammetri

23
3D mätningar och bildbehandling - Digital fotogrammetri
För- och nackdelar med BILDER (altså med passiv optisk fjärranalys) - vädret - skuggor och blockering/ockludering -/+ “Att åstadskomma något i 3D är lite komplicerad” (Analytisk geometri + databehandling) + Att nå “tät urval/samplig” är billigare än med LiDAR/radar + Multispektrala bilder, tidssekvensser möjliga “Skogen är ett kompliserad 3D system”
 - vädret. - skuggor och blockering/ockludering. -/+ Att åstadskomma något i 3D är lite komplicerad (Analytisk geometri + databehandling) + Att nå tät urval/samplig är billigare än med LiDAR/radar. + Multispektrala bilder, tidssekvensser möjliga. Skogen är ett kompliserad 3D system")
24
Den okomplicerade 3D vägen - Flygburen laserskanning
Om tekniken “som detonerade banken“: Apparatens delar och funktion: - Snabb laser pulssändare (pulser av nanosekunders längd) - Pulsenergin sprider sig Gaussiskt, mycket smalt ’fotspåret’ - Laserljusets våglängd t.ex.532, 1064, 1550 nm. IR-sensorer dominerar, - Mottagere med en snabb fotonräknare (fotodiod), ut far spänningen, snab analys för ekon (tidsinterval, distans, spridningsintensitet) och/eller sampling (provtagning) av amplitudvärden, på en GHz hastighet - En exakt klocka, mäter ljusets gångstid, distansen = 1/2tc. - Uppmätningar: ekon eller vågformen, eller båda - Datorn + GPS/INS systemet, apparatens orientering (vridning) och position, kontinuerligt. Skanner-objekt vektorn Leveranspriset miljoner € - Avsedda för topografisk kartläggning (träd utgör problem)
 - Pulsenergin sprider sig Gaussiskt, mycket smalt ’fotspåret’ - Laserljusets våglängd t.ex.532, 1064, 1550 nm. IR-sensorer dominerar, - Mottagere med en snabb fotonräknare (fotodiod), ut far spänningen, snab analys för ekon (tidsinterval, distans, spridningsintensitet) och/eller sampling (provtagning) av amplitudvärden, på en GHz hastighet - En exakt klocka, mäter ljusets gångstid, distansen = 1/2tc. - Uppmätningar: ekon eller vågformen, eller båda - Datorn + GPS/INS systemet, apparatens orientering (vridning) och position, kontinuerligt. Skanner-objekt vektorn . - Leveranspriset miljoner € - Avsedda för topografisk kartläggning (träd utgör problem)")
25
Om laserskanninginformation
‘Fotogrammetri använder ljus för at nå koordinater’ Modern fotogrammetri har med radiometrin och göra, också Cam #1 Cam #2 Cam #3 LiDAR Z Y X

26
Om laserskanninginformation
Laserskanner (LiDAR) Flygbana / orientering GPS + accelerationer tx (X0, Y0, Z0, , , ) Positionen och läget i stund tx, F = 100200 kHz Skanningsvinkel ( 20°) + Laserpulssens riktning (i,j,k) = f(, , , ) Objekts position: (Xa,Ya,Za) = (X0,Y0,Z0)(laser) + distans (i,j,k) Distans Utgående vågform och den som återvänder (återspridning). Objekt (Xa, Ya, Za) Belyst område (fotspåret, footprint)
 Flygbana / orientering GPS + accelerationer. tx (X0, Y0, Z0, , , ) Positionen och läget i stund tx, F = 100200 kHz. Skanningsvinkel ( 20°) + Laserpulssens riktning (i,j,k) = f(, , , ) Objekts position: (Xa,Ya,Za) = (X0,Y0,Z0)(laser) + distans (i,j,k) Distans. Utgående vågform och den som återvänder (återspridning). Objekt (Xa, Ya, Za) Belyst område (fotspåret, footprint)")
27
Flygburen laserskanning
Laserskanning ger observationer om växlighetens geometri och radiometri (volymetrisk återspridning). Bladyta, bladställning, täthet, osv. påverkar signalen. Pulsen når ofta terrängen genom öppningar (mått på dem)
. Bladyta, bladställning, täthet, osv. påverkar signalen. Pulsen når ofta terrängen genom öppningar (mått på dem)")
29
Laserskanning – För- och nackdelar
+ Väldigt lätt att utföra 3D rekonstruering. Direkt mätning av XYZ-koordinater (Jämför med bildmatching) + Aktivt system. Vädret är en mindre kritisk komponent. Solljus filtras bort. Nedanför molntäcket, 48bättre chanser vädervis under växtperioden i jämförelse med rymd- eller flygburen fotografering (passiv FA). + Inga skuggor i landskapet, minskad blockeríng/ockludering p.g.a små vinklar Skanning +/- 15 grader längs lodet, nedåt. Återspridning endast på en våglängd. Ringa BRDF-effekter (bidirektionel ljusspridningsfunktion). Konstiga effekter p.g.a distansvariationen eftersom fotspåret täcks ej helt av löv och barr. Systembundna justeringar. Sensor orientering är känslig för GPS-fel. Vinklar (vridning av laserkanonem) har ett medelfel på mikroradianer, ju högre man flyger, desto värre noggranhet för punkter i terrängen. - Icke-systematisk sampling (punktkonfigurationen beror på många faktorer) Höga samplinggrader blir dyra pga låga flyghöjder.
 + Aktivt system. Vädret är en mindre kritisk komponent. Solljus filtras bort. Nedanför molntäcket, 48bättre chanser vädervis under växtperioden i jämförelse med rymd- eller flygburen fotografering (passiv FA). + Inga skuggor i landskapet, minskad blockeríng/ockludering p.g.a små vinklar Skanning +/- 15 grader längs lodet, nedåt. Återspridning endast på en våglängd. Ringa BRDF-effekter (bidirektionel ljusspridningsfunktion). Konstiga effekter p.g.a distansvariationen eftersom fotspåret täcks ej helt av löv och barr. Systembundna justeringar. Sensor orientering är känslig för GPS-fel. Vinklar (vridning av laserkanonem) har ett medelfel på mikroradianer, ju högre man flyger, desto värre noggranhet för punkter i terrängen. - Icke-systematisk sampling (punktkonfigurationen beror på många faktorer) Höga samplinggrader blir dyra pga låga flyghöjder.")
30
Laserkanning i skogen Pulser som nått terrängen – digital höjdmodel
Ekon i trädkronor trädhöjder, positioner, krondiametrar, trädslag, inventering av virkesförråd med “enstaka träd –metoden”. (Yksinpuintulkinta) Ekon i trädkronor inom ett bestämd område : kalkylering av statistiska fördelningsvariabler (medelvärde, standardavvikelse, kvantiler,..) av höjd- och intensitetdistributioner. (Aluepohjainen)
 Ekon i trädkronor inom ett bestämd område : kalkylering av statistiska fördelningsvariabler (medelvärde, standardavvikelse, kvantiler,..) av höjd- och intensitetdistributioner. (Aluepohjainen)")
31
Laserkanning i skogen – empiriska FA
Uppskattning av medelhöjden på provytenivå. Förklarande variabler: höjdkvartiler, Kvot av terrängsträffar, osv. Precisionen av stamvolym på provytenivå.

32
Laserkanning i skogen – empiriska FA
Laserskanning används redan för uppskattning av virkesresursser för skogsbruksplanering - Laserskanning, 1 €/ha - Flygbilder, 0.5 €/ha - Provytor, 24 €/ha - Statistisk imputering, 0.5 €/ha Resultater är - i rasterformat eller enligt beståndsindelning - indelning i bestånd sker genom tolkning av laserdata (segmentering) - stamvolym, medelhöjd, grundyta, stamantal per trädslag - I bestånd där H> 6-8 meter Första erfarenheter i Nordamerika och i Ryssland på 1980-talet. I Norden, praktisk använding började i Norge
 - stamvolym, medelhöjd, grundyta, stamantal per trädslag - I bestånd där H> 6-8 meter Första erfarenheter i Nordamerika och i Ryssland på 1980-talet. I Norden, praktisk använding började i Norge.")
33
Vad forskar man nu? Starka empiriska sambanden har man redan hittat och utnyttjat (där pengar har varit med i spelet) Lätt automatiserade funktioner har redan blivit autom. (punktmolnalgoritmer, bildmatchningsalgoritmer) Nya applikationsområden kommer, söks. (det finns annat också iskogen, tidserier, uppföljningsmetoder) Teoretisk arbete siktar på en bättre förståelseav ljusets beteende i växligheten, och i atmosfären. Syntetiska provytor i framtiden som målet, t.ex. Byggandet av simulatorer som samlar kunnandet. Fotografering (hyperspektral scanning) från flera riktningar för en bättre beskriving av växligheten, med flera våglängder. Hur signaler varierar med synvinkeln beror delvis på växligheten. Koppling av inventeringar och tillväxtprognoser, i stil ’Kalman-filtering’ Kloka och komplexa klassificeringsalgoritmer (maskininlärning)
 Nya applikationsområden kommer, söks. (det finns annat också iskogen, tidserier, uppföljningsmetoder) Teoretisk arbete siktar på en bättre förståelseav ljusets beteende i växligheten, och i atmosfären. Syntetiska provytor i framtiden som målet, t.ex. Byggandet av simulatorer som samlar kunnandet. Fotografering (hyperspektral scanning) från flera riktningar för en bättre beskriving av växligheten, med flera våglängder. Hur signaler varierar med synvinkeln beror delvis på växligheten. Koppling av inventeringar och tillväxtprognoser, i stil ’Kalman-filtering’ Kloka och komplexa klassificeringsalgoritmer (maskininlärning)")
34
Vad forskar man – exemplar på mina äventyr?
“Enstaka träd” –metoden med bilder+LiDAR kombinerad

35
“Enstaka träd” –metoden med bilder: trädpositioner, höjder

36
Kronform med laserpunkter
Krondiametern med flygfoton

37
Höjdmodeller med hjälp av gamla foton i arkivet.
Försumpningen av träsk och gölar I fototidsekvenser

38
Kartläggning av renlavar med lasersignalen

39
Uppskattning av plantbestånd i flygfoton och laser.

40
Mätning och kartläggning av objekt med laserpulser som ej har tangerat dom.
Öppningar I pseudodatan motsvarar trädkronor

41
Jämförelser av kameror och laserskannrar i fält / simulering.
ADS40 radkamerabild. Vägen ej går i sicksack. Samtidig mätningen av belysning och reflektans-spektrum av objekt.

42
Utveckling av metoder för att bestämma positionen under krontaket på dm-nivå.

43
Identifiering av torvmarkstyper I laserskanning articifiell intelligens används med över 60 förklarande variabler.

44
Klassificering av trädslag med laserskanningsdata
Trädkronor och tak i Hyytiälä

45
Klassificering av trädslag i reflektansflygfoton, med riktningsbereonde signaler
Bestämning av skuggor och kamerasynlighet Bi-direktionel ljusspridning hos tall, gran och björk. Blå, grön, röd, och när-infraröd våglängder Resultat visar att - Riktningsberoende signaturer gav en lindrig (oansenlig) hjälp - Enstaka träd syns likadant mörka eller bleka åt alla riktningar, på alla våglängder Det är orsaken bakom den höga reflektansvarianssen inom trädslag - Trädslagsidentifiering håller sig som oavgjort problem
 hjälp - Enstaka träd syns likadant mörka eller bleka åt alla riktningar, på alla våglängder. Det är orsaken bakom den höga reflektansvarianssen inom trädslag - Trädslagsidentifiering håller sig som oavgjort problem.")
46
Skogsuppskattning med en mobiltelefonkamera.
Skogägaren går omkring och tar foton, enstaka och systematiskt placerade. Dataöverföring. Tolkning.

47
Identifiering av förändringar, och skador i laser tidserier
Snöskador. Röjning av underväxten.

48
Uppskattningen av underväxten, ungskogväxligheten i vågform- och ekolaser
Trädslagsklassificering i vågformlaser

49
Terrester fotogrammetri för en bättre förståelse om lasersignalen
Första ekon ytor med jämna reflekstans Asfalt, amplitud-värden varierar

52
Simulering av laserskanning och återspridning i skogsvegetation
Björk, Bergrör Mjölke Vi har kontroll över skannern och kan ha den såsom vi vill (testa parametrar). Återspridning är enklare att behärska. En våglängd endast, en riktning endast. Byggandet av växter == flaskhalsen
. Återspridning är enklare att behärska. En våglängd endast, en riktning endast. Byggandet av växter == flaskhalsen.")
53
Tackar!

Liknande presentationer