Ladda ner presentationen
Presentation laddar. Vänta.

2
Mekatronik finns på de flesta högskolor
Som program Halmstad, Chalmers Som specialisering på KTH, Stockholm LiTH, Linköping LTU, Luleå LTH, Lund Huvudsakligen på maskinteknikprogrammen

3
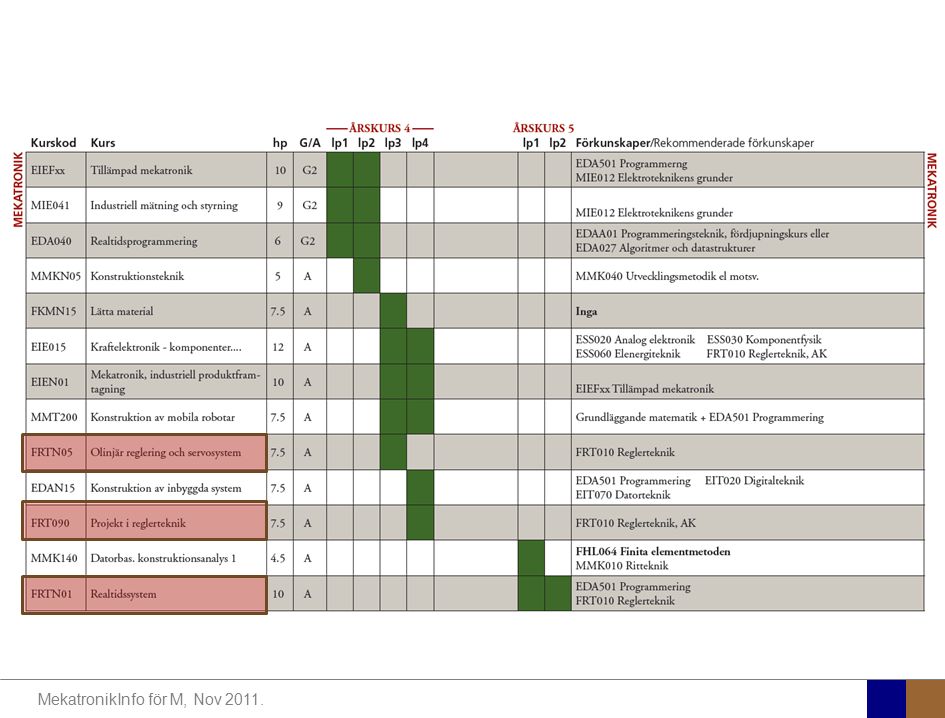
Kurser i mekatronikspecialiseringen
Tillämpad mekatronik M+E+D=Mekatronik Industriell produktframtagning Industriell tillämpning Industriell mätning och styrning E+D för M Datorbaserad konstruktionsanalys M, ingår i spec PU Konstruktionsteknik Lätta material M Sevicerobotik Kraftelektronik Elektroteknik Realtidsprogrammering Datavetenskap Konstruktion av inbyggda system Realtidssystem Reglerteknik Olinjär reglering av servosystem Projekt i reglerteknik

4
Kurser mot elektrisk och digital styrning
Kurser mot mekanisk konstruktion Tillämpad mekatronik Ind. mätning och styrning Konstruktionsteknik Kraftelektronik- komp. och motorstyrning Datorbaserad konstruktionsanalys Realtidsprogrammering Lätta material Inbyggda system Servicerobotik Olinjära system Ind. produktframtagning Realtidssystem

5
Lund November 2011 Mekatronik – robotexempel Klas. Nilsson@cs. lth
Lund November Mekatronik – robotexempel and Lund University, Sweden rss.cs.lth.se

6
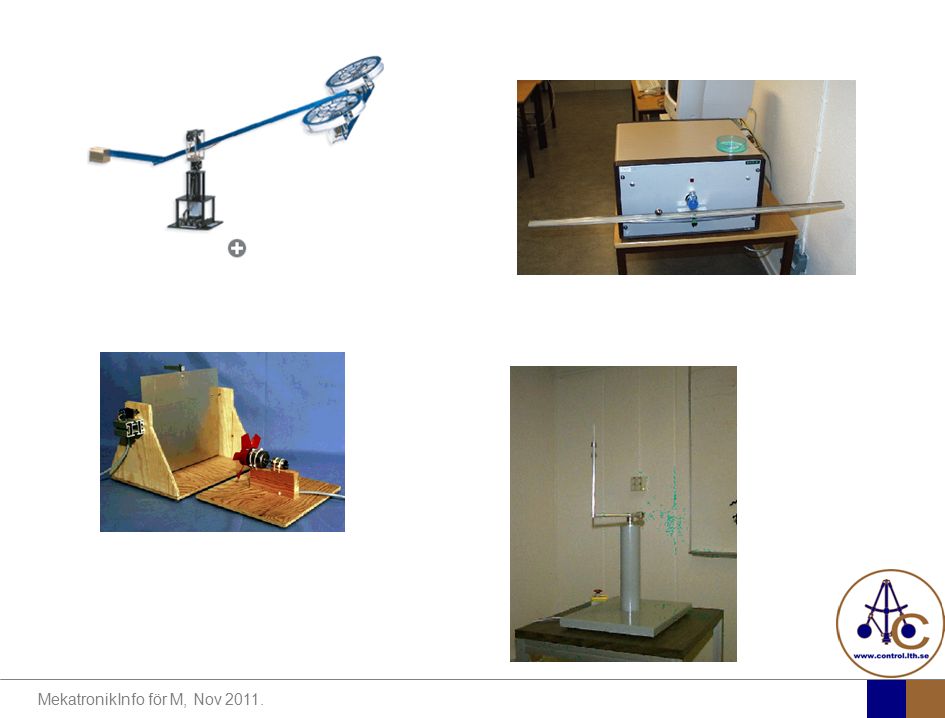
Mekatronik Robotar - bilder

7
Example industrial collaboration ULUND-ABB work (F/T control)
")
8
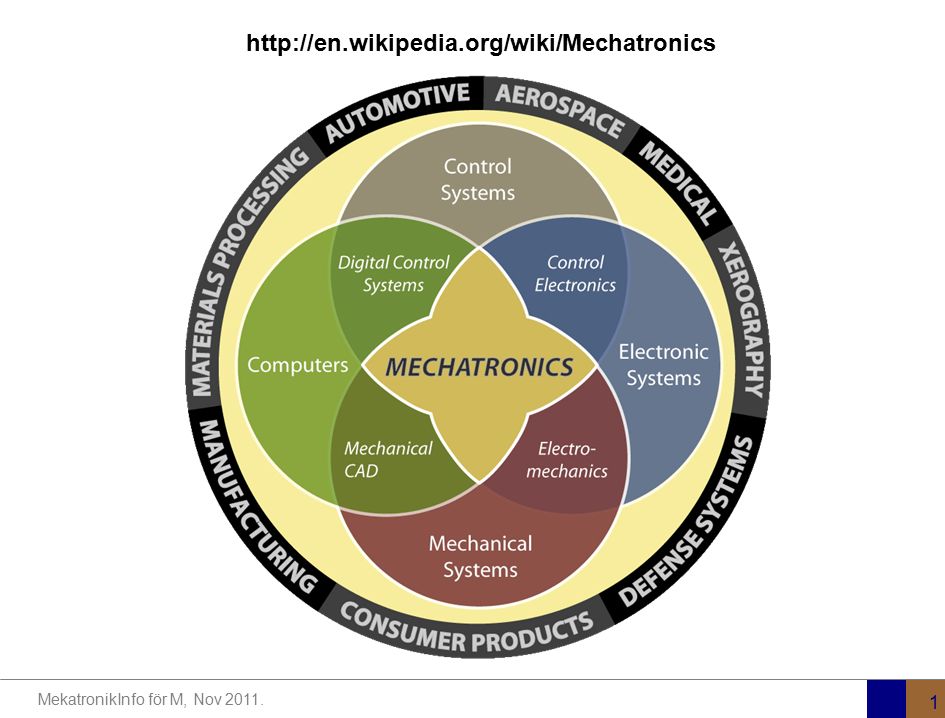
Mechatronics includes software & control
Suggested definition: Combination of electro-mechanics and embedded systems (software & electronics) such that the physical properties or the functionality is enabled by the embedded information processing. [Def by Klas, after inspiration by mechatronics Prof. Auslander, Berkely] ;-) Implies embedded feedback! (Why?) Hint: Properties include dynamics as differential relations. Compare state-space formulation with the effect of feedback....
 such that the physical properties or the functionality is enabled by the embedded information processing. [Def by Klas, after inspiration by mechatronics Prof. Auslander, Berkely] ;-) Implies embedded feedback! (Why ) Hint: Properties include dynamics as differential relations. Compare state-space formulation with the effect of feedback....")
9
Technical resources: embedded systems
Cost: Production Market opportunity Interface: Interoperability Openness Usability Client satisfaction Adaptation: Portability Modifiability Evolvability Expandability Flexibility Configurability Reusability Scalability Performance: Performance (Speed) Timeliness (Deadlines) Determinism Security Robustness Reliability Availability Safety Design: Feasibility Maintainability Understandability Correctness Simplicity Integrability Testability&Debugging Resources in embedded systems Timing (CPU, HW,..) Memory (#bytes,..) Communication Device/unit-physical (energy, ..) Engineering effort Bounded and interconnected, use optimally for best possible product properties and profit
 Timeliness (Deadlines) Determinism. Security. Robustness. Reliability. Availability. Safety. Design: Feasibility. Maintainability. Understandability. Correctness. Simplicity. Integrability. Testability&Debugging. Resources in embedded systems. Timing (CPU, HW,..) Memory (#bytes,..) Communication. Device/unit-physical (energy, ..) Engineering effort. Bounded and interconnected, use optimally for best possible product properties and profit.")
10
Robot System Architectures
Product line architectures: Reflecting: Product lines Application areas User interaction Technologies Resource tradeoffs Variation points Implicit knowledge Business cases Certification Engineering taste Taste/architecture is personal! Thus, standardize on techniques for architectures but not the architecture! From

11
The ”principle of superposition/compositionality” needed for modular development
Important need: Property of compositionality for software components and computations! Super-position and compositionality Separation into sub-problems which solutions together comprise the solution to the overall problem. Used in physics, mathematics, solid-state mechanics, electro-technology, etc. Within mechanics and electronics there are composable components. However, missing compositionality for (robotic/control) software components... Too extensive engineering needed for development of mechatronic systems.
 software components... Too extensive engineering needed for development of mechatronic systems.")
12
Embedded information processing: Going from Analog to Digital (still hardware)
Direct effect No quantization Truly parallel Cost Repeatability (drift, etc.) Cost Repeatability Truly parallel Quantization Latencies
 Cost. Repeatability. Truly parallel. Quantization. Latencies.")
13
Then programmable units (software), Multitasking RTOS (Real-Time Operating System)
Cost reduction Programability Modularity (resources) Delays Timing variations (jitter) Modularity of execution Flexibility Predictability Resource management Modularity
 Delays. Timing variations (jitter) Modularity of execution. Flexibility. Predictability. Resource management. Modularity.")
14
Software components using safe language, first concurrency and then for real-time
Modular reactivity Safety Modularity (IO, memory) Timing variations End of current practice; the rest is research Modular real-time Robustness Portable compilation Resource optimization Timing variations for IO
 Timing variations. End of current practice; the rest is research. Modular real-time. Robustness. Portable compilation. Resource optimization. Timing variations for IO.")
15
Control components, scheduled IO, then feedback scheduling of resources
Virtual CPUs Composable IO Global memory Resource optimization Safety Performance tuning Control components Global memory Resource optimization Safety

16
Towards compositionality for embedded software
Ongoing integration and further development: Object-oriented and portable safe real-time SW Control components as composable SW Resource-aware components & control systrems! Merging Resource-aware components Control: Software:

17
Combining Safety, Stiffness and Low-Cost
The safe and productive human-aware space-sharing robot

18
Complementary (stiff low-cost) technique: New parallel robot principle, named Tau
Invented by Torgny Brogårdh, ABB High performance as for parallel robots Large work space and good flexibility as for traditional serial robots

19
Plug-and-Produce modular equipment
Workcell Robot Tooling Two-finger grip Platforms “IKEA-like” PKM robot W L Gripper example: Ceiling mounted Three-finger parallel-grip Robot The three-day-deployable integrated robot system Three-finger centric-grip. Virtual Cell/Unit Fewer but more flexible modules Real

20
Parallel Kinematics: Mechanical Design
Main goal to maximize: Stiffness/weight Bandwidth/weight

21
Parallel Kinematics: Performance Calculations
Arm System Stiffness Calculations: 0.5 m Lowest eigenfrequency: 47 Hz Translational stiffness at TCP: 1.2 – 50 N/micron Torsional stiffness at TCP: – 920 Nm/mrad

22
Parallel Kinematics: Performance Comparison
10 20 30 N/mm,kg 40 50 60 70 Hz New SMErobot PKM Tau robots 5 times better, for same weight & approx price. PKM Serial Arm

23
New Lightweight Wrist PKM joints and links Wrist motor holder
Wrist motor (new HDD motor)
")
24
Lightweight Wrist: Performance Tests

25
ABB-ULUND-Güdel prototype for foundry

26
Video: Slipning med Kraftreglerad PKM
ABB-Güdel-LTH Tau/PKM prototyp: Video (med förra generationens handled) Video: Slipning med Kraftreglerad PKM
 Video: Slipning med Kraftreglerad PKM")
27
Glappreduktion med programvara; Fullskalig dubbelmotorprototyp

28
Återkoppling; Inspiration

29
Mekatronik Vad behöver ni kunna? Datorer Programmering Sensorer
C, Java Sensorer Motorer Reglerteknik Elektronik Mekanik ….. Mekatronik

30
Hårdvara & Mjukvara Sensorer och motorer Processorer och elektronik
Hjul encoders Accelerometer & Gyro Två DC motorer Processorer och elektronik ATMEL AVR Mega16 microcontroller Inget RTOS – bara avbrott och timers, C Elektronik för signalanpassning, filtrering, strömförsörjning Reglerteknik Tillståndsåterkoppling Tidsdiskret design

32
Realtidssystem Design och implementering av datorbaserade reglersystem
Fokus på inbyggda system Två delar: Realtidssystem/programmering Datorimplementering av reglersystem Java och C 10 hp Föreläsningar, övningar, laborationer, projekt HT Lp1-2

34
VT LP1 7.5 hp

35
Projektkurs i Reglerteknik
7,5 hp under VT LP2 Ca 15 studenter, vanligen F,E,D,M Projektgrupper om 4 personer Projekt, rapport, presentation Betyg: Godkänt / Ej godkänt Fokus: Inbyggda reglersystem Hela kedjan från Modellering till Implementering På senare år: inbyggda system, mobila robotar, sensornätverk, Lego Mindstorm, Segways

36
Tre praktiskt inriktade mekatronikkurser:
Industriell mätning och styrning (IMS) 9 hp Tillämpad mekatronik 10 hp Mekatronik: Industriell produktframtagning 10 hp
 9 hp. Tillämpad mekatronik 10 hp. Mekatronik: Industriell produktframtagning 10 hp.")
37
Vad gör man i kurserna? (1)
IMS: Enbart M och I Fortsätter där ETG slutar Ger komponentkunskap Konstruktionsprojekt (ca 100h) Tillämpad Mekatronik: Allsidigt sammansatta grupper (M,E,F.. - Laborationsprojekt - Industriprojekt (Koncept o konstr.)
 Tillämpad Mekatronik: Allsidigt sammansatta grupper (M,E,F.. - Laborationsprojekt. - Industriprojekt (Koncept o konstr.)")
38
Vad gör man i kurserna? (2)
Industriell produktframtagning: (Forts. på Tillämpad Mekatroniks industriprojekt) Allsidigt sammansatta grupper Industriprojekt (Detaljkonstr. o prototypbygge)
 Allsidigt sammansatta grupper Industriprojekt (Detaljkonstr. o prototypbygge)")
39
Industriell mätning och styrning
Detta får du lära dig Hur man elektriskt mäter temperatur, tryck, kraft mm Anpassning av yttre signaler för mätning och styrning Hur man gör små inbyggda självständiga datorsystem. Hur programvara och hårdvara fungerar tillsammans

40
Fler IMS-projekt… Konstruktionsprojekt: djupreglering av modellubåt
mätning av utgångshastighet för luftgevär

41
Labprojekt i Tillämpad Mekatronik
Kommunikation PC Inbyggt system Aktuatorer (motor mm) Moduler på prototypkort Debugging viktigt
 Moduler på prototypkort. Debugging viktigt.")
42
Industriprojektet i. “Tillämpad Mekatronik” och
Industriprojektet i “Tillämpad Mekatronik” och “Industriell Produktframtagning” Problem hämtat från företag Nära samverkan med företaget under hela processen Skall leda fram till fungerande prototyp som presenteras på utställning

43
Fråga: Men är det en fördjupning när man ‘bara’ lär sig lite grann om varje ämne?
Svar: Som att tex Internet inte är något, eftersom det ‘bara kopplar ihop’ information? Motfråga: Kan en föränderlig verklighet vara uppdelad i skolämnen, eller är kanske förmågan att kombinera ämnesområdena den riktigt djupa kunskapen?

Liknande presentationer






 Mechatronic development excellence benchmark.>")










, or Telesystems (ETAC52)>")

